반응형
카메라의 파라미터(parameters)를 추정하는 과정을 카메라 캘리브레이션이라고 한다.
실세계의 3D 점과 캘리브레이션된 카메라로 캡처한 이미지의 해당 2D 투영(픽셀)간의 정확한 관계를 결정하는데 필요한, 카메라에 대한 모든 정보(파라미터 또는 계수)를 의미한다.
일반적으로 이것은 두 종류의 파라미터를 복구하는 것을 의미한다.
1. 카메라/렌즈 시스템의 내부 파라미터(Internal parameters).
예: 초점 거리(focal length), 광학 중심(optical center), 렌즈의 방사 왜곡 계수(radial distortion coefficients of the lens).
2. 외부 파라미터(External parameters): 이것은 일부 세계 좌표계에 대한 카메라의 방향(회전 및 이동, Rotation and translation)을 나타낸다.
아래 이미지에서, 기하학적 캘리브레이션(geometric calibration)을 사용하여 추정된 렌즈의 파라미터는 이미지 왜곡을 제거하는데 사용
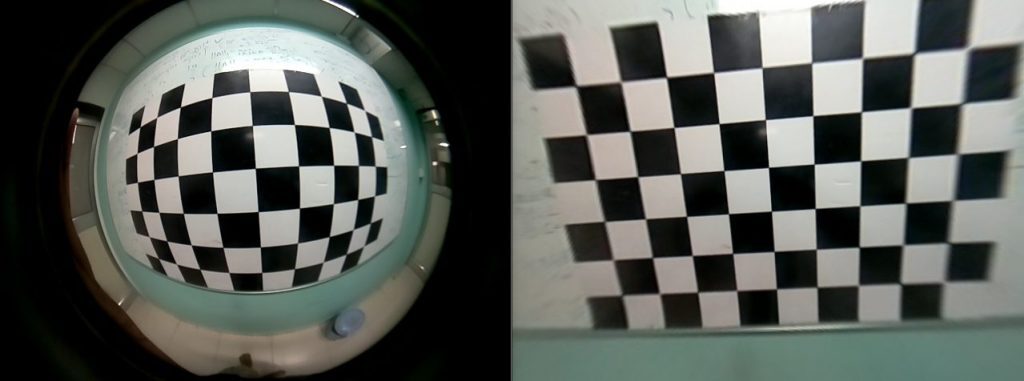
광학장비로 촬영한 이미지를 보정하는 과정이라고 생각하면 된다.
반응형
'머신비전' 카테고리의 다른 글
| [머신 비전]프레임 그래버 (Frame Grabber) (0) | 2024.04.02 |
|---|---|
| Line Scan Camera, Area Scan Camera (0) | 2024.04.01 |
| [머신비전 기본용어] 디지털 이미지(Digital Image) (0) | 2023.06.17 |
| [머신비전 기본용어]Pixel Resolution(픽셀분해능), 최소 검출 사이즈 (0) | 2023.06.17 |
| [머신비전 기본용어] Depth of Focus (DOF, 심도) (0) | 2023.06.17 |



